






This item is archived from our catalog and no longer for sale. This page is available as a reference only.
Pololu 4.4:1 Metal Gearmotor 25Dx63L mm MP 12V with 48 CPR Encoder
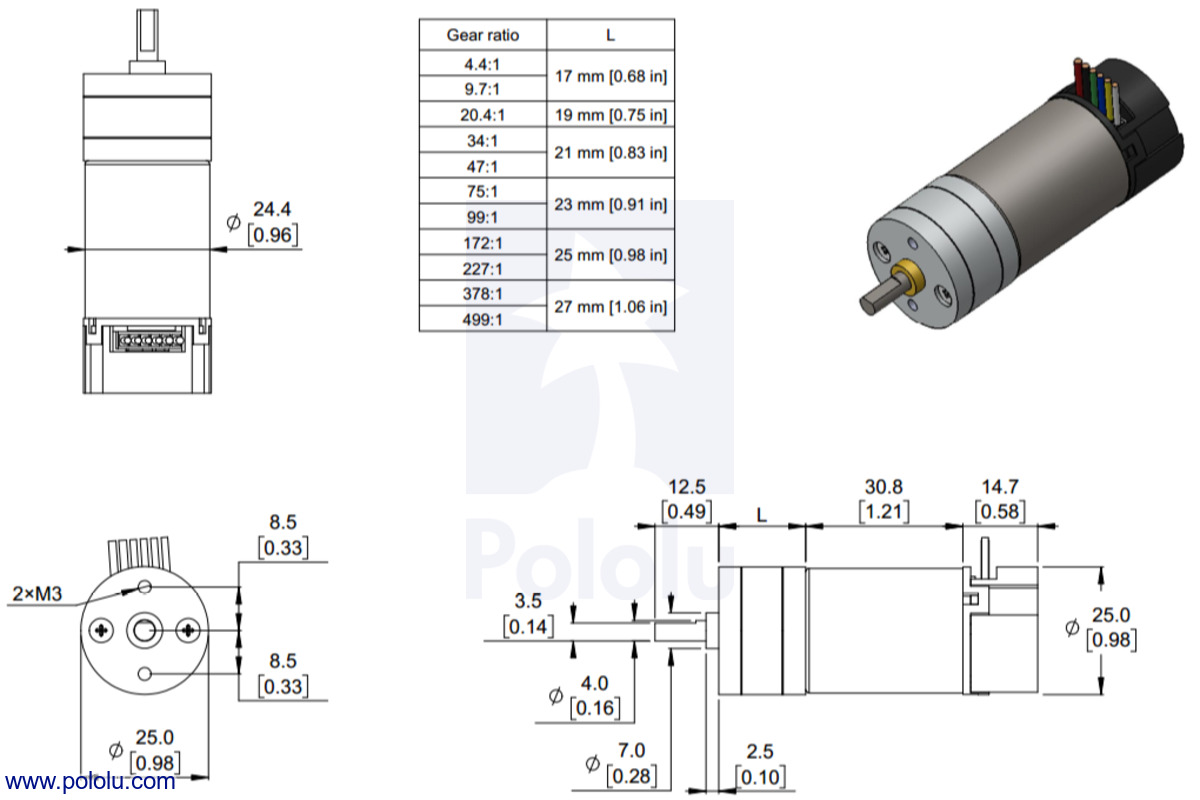
This gearmotor consists of a medium-power, 12 V brushed DC motor combined with a 4.4:1 metal spur gearbox, and it has an integrated 48 CPR quadrature encoder on the motor shaft, which provides 211.2 counts per revolution of the gearbox’s output shaft. The gearmotor is cylindrical, with a diameter just under 25 mm, and the D-shaped output shaft is 4 mm in diameter and extends 12.5 mm from the face plate of the gearbox.
Key specifications:
| voltage | no-load performance | stall extrapolation |
|---|---|---|
| 12 V | 1700 RPM, 200 mA |
0.8 kg⋅cm (11 oz⋅in), 2.1 A |
Dimensions
The diagram below shows the dimensions of the 25D mm line of gearmotors (units are mm over [inches]).
 |
|
Dimensions of the Pololu 25D mm metal gearmotors with encoders. Units are mm over [inches]. |
|---|
Warning: Do not screw too far into the mounting holes as the screws can hit the gears. We recommend screwing no further than 6 mm (0.24″) into the screw hole.
| Size: | 25D x 63L mm1 |
|---|---|
| Weight: | 95 g |
| Shaft diameter: | 4 mm |
General specifications
| Gear ratio: | 4.4:1 |
|---|---|
| No-load speed @ 12V: | 1700 rpm |
| No-load current @ 12V: | 200 mA |
| Stall current @ 12V: | 2100 mA |
| Stall torque @ 12V: | 11 oz·in |
| No-load speed @ 6V: | 850 rpm2 |
| Stall current @ 6V: | 1050 mA2 |
| Stall torque @ 6V: | 5 oz·in2 |
| Motor type: | 2.1A stall @ 12V (MP 12V) |
| Lead length: | 8 in3 |
| Encoders?: | Y |