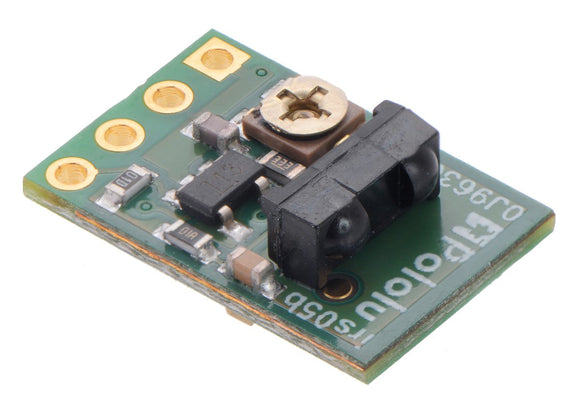









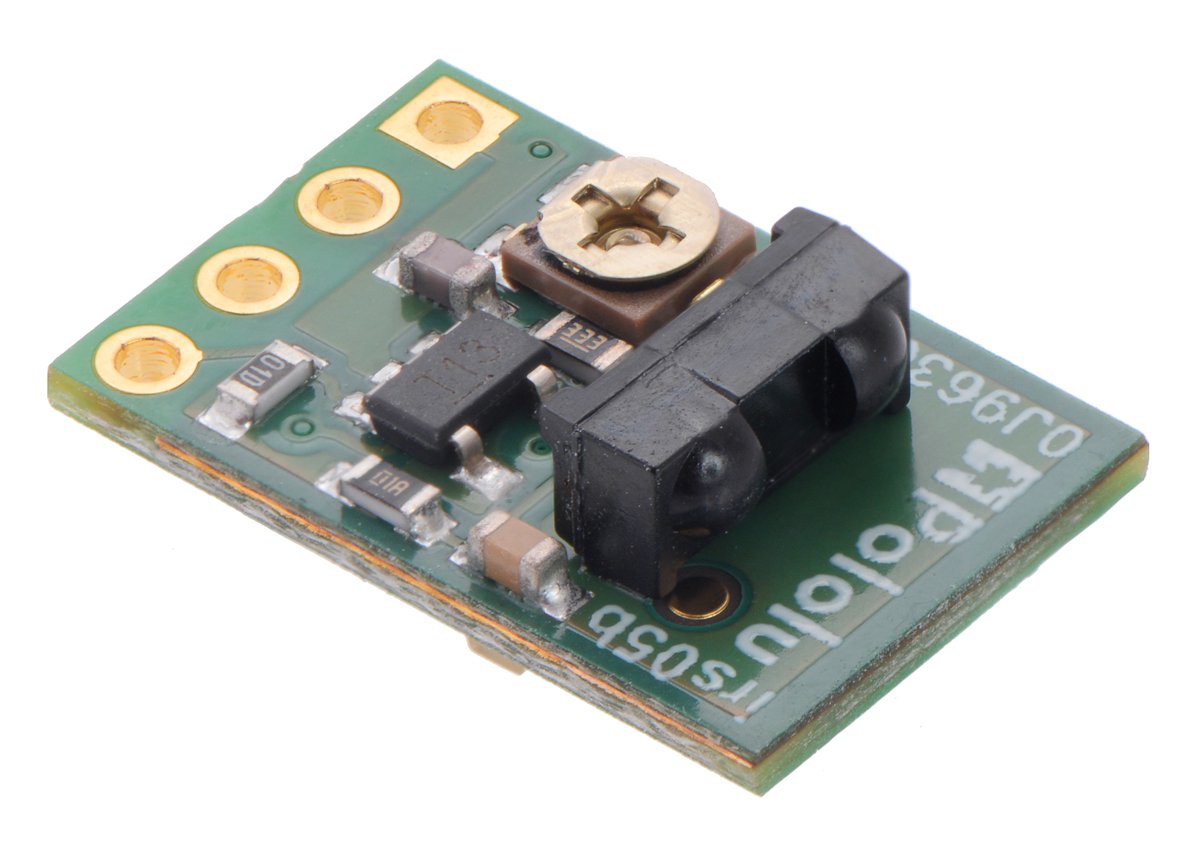
This module features a fixed-gain, 38 kHz modulated IR sensor and a corresponding IR LED with oscillator circuit to make a tiny proximity sensor. This high-brightness version draws an average of 16 mA at 5 V and has a typical sensing range up to approximately 24 inches (60 cm).
Overview
These sensor modules are based on Vishay’s TSSP77038 modulated infrared receivers. Unlike most IR receiver modules designed for remote control of appliances like televisions, the TSSP77038 has a fixed gain (sensitivity) that makes the sensor more predictable when used in proximity or reflectance sensors. The Pololu carrier module combines the TSSP77038 with an IR LED driven by a 555 timer-based circuit to make a complete sensor module that requires only a 3.3 V to 5 V power connection. An enable input allows control of whether or not the IR LED is on, and a digital output indicates whether or not an object is detected. The module is available in low-brightness and high-brightness versions, which provide detection ranges of up to approximately 12 inches (30 cm) and 24 inches (60 cm), respectively. The actual performance depends on many factors, including object size, reflectivity, and ambient lighting conditions.
We carry several through-hole IR receivers that work nicely with the high-brightness LED and 38 kHz modulation circuit of these proximity sensors: the TSSP58038 is a through-hole version of the surface-mount TSSP77038 detector on these proximity sensors, and the TSSP58P38 is a unique modulated IR receiver with an output that can be used to measure distance. You can use several of the proximity sensors with these discrete IR receivers to make sophisticated sensing solutions in which you enable one emitter at a time and monitor the reflections with the other sensors.
Using the sensor
 |
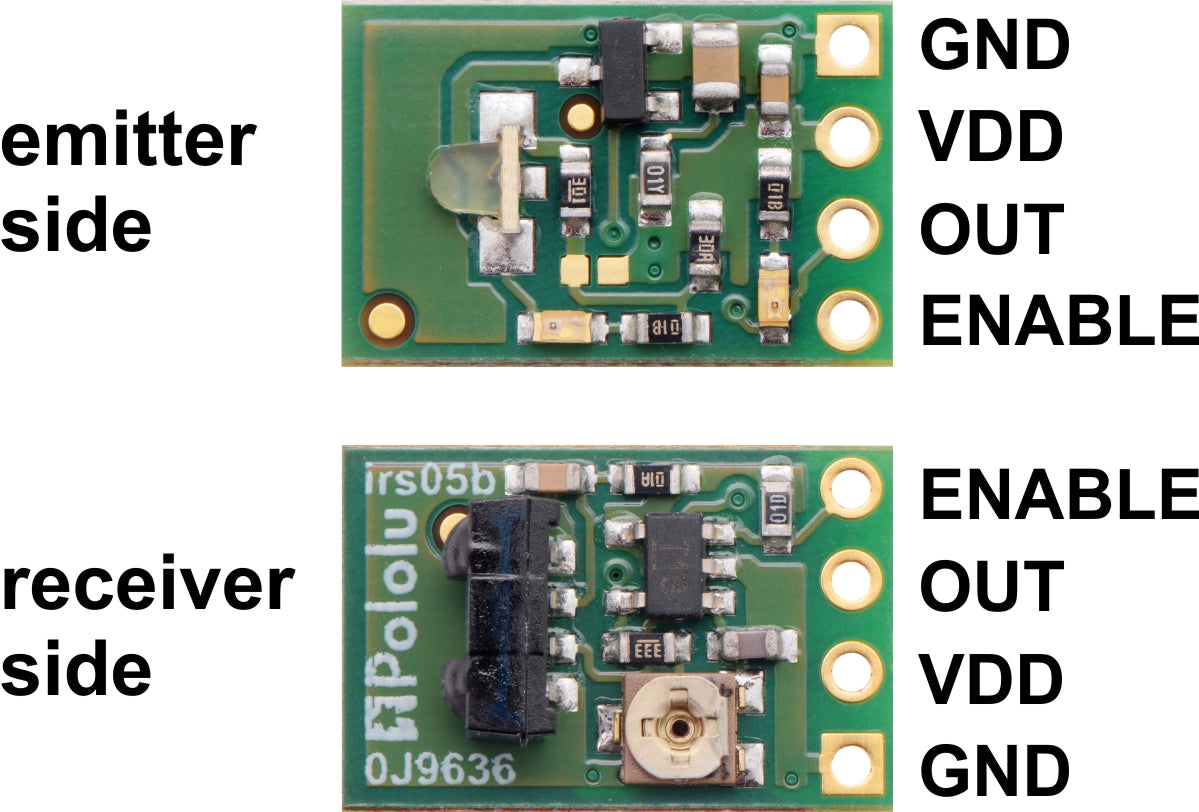
Connections
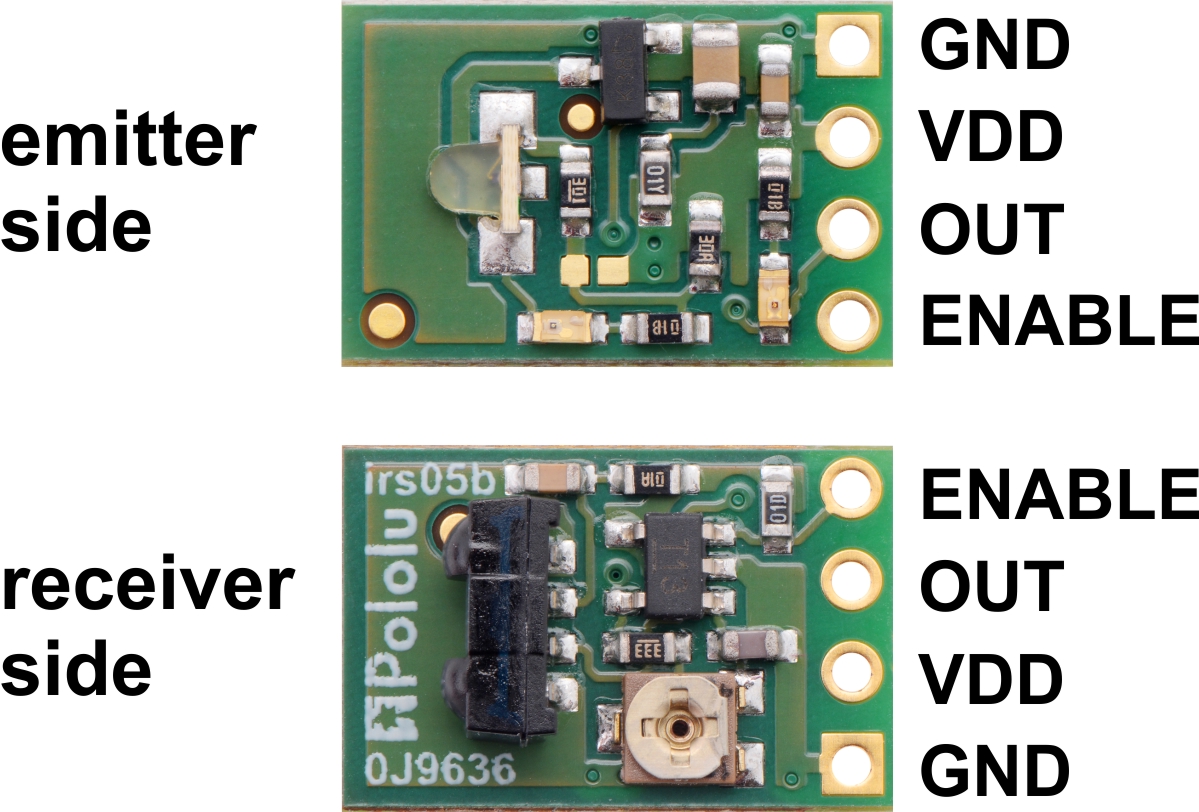
The proximity sensor has four connections: ground (GND), logic power (VDD), digital detection indicator (OUT), and IR emitter enable (ENABLE).
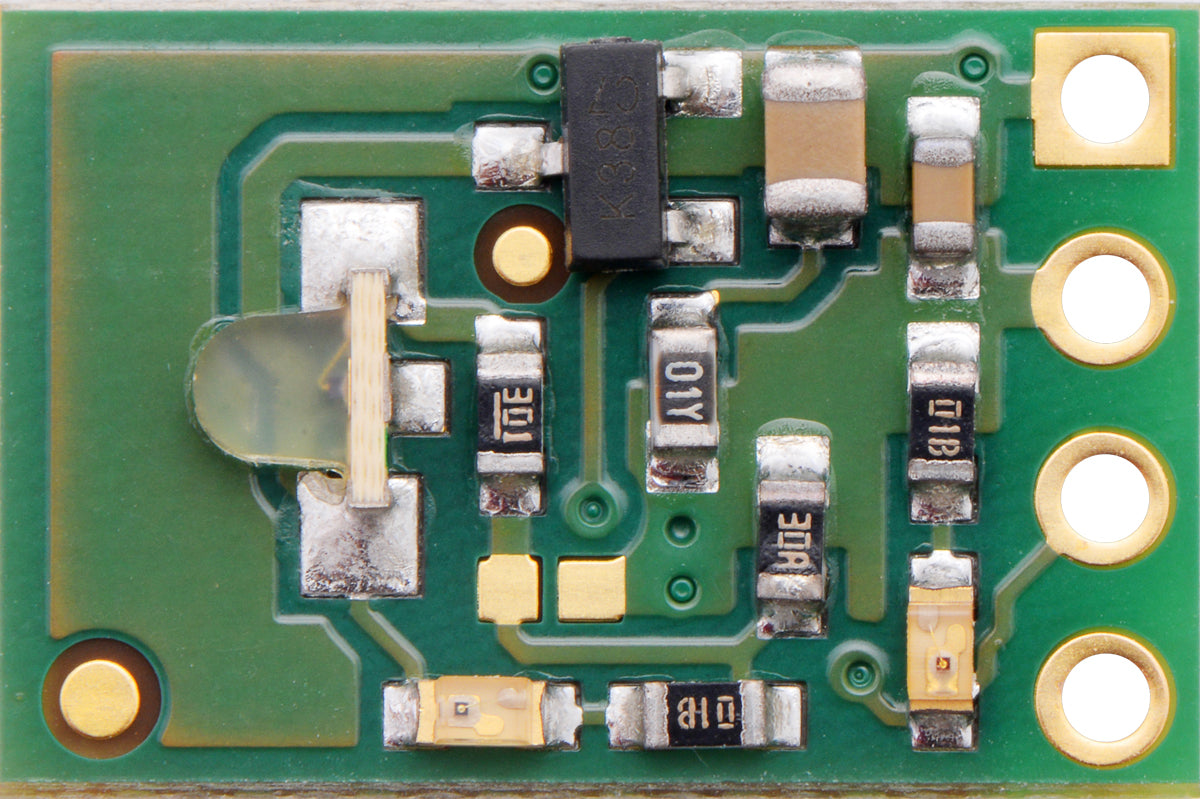
The logic power, VDD, should be between 3.3 V and 5 V. Supplying less than 5 V will decrease the IR LED brightness and decrease the sensing range. To run the sensor at full brightness while powered at 3.3 V, bridge the surface mount jumper located on the emitter side of the board.
The OUT pin, which is high by default, remains low as long as the TSSP77038 receiver is detecting a sufficient signal. When at the edge of the detection range, this output will alternate between high and low. A red LED on the emitter side of the board is tied to this output and turns on when the pin goes low, providing a visual indication of when the sensor is detecting something.
The ENABLE pin turns off the IR emitter LED when it is set low. This pin is high by default and can be left disconnected if dynamic control of the IR emitter is not needed. A green LED on the emitter side of the board is connected in parallel with the IR LED, making it easy to tell when the IR LED is on.
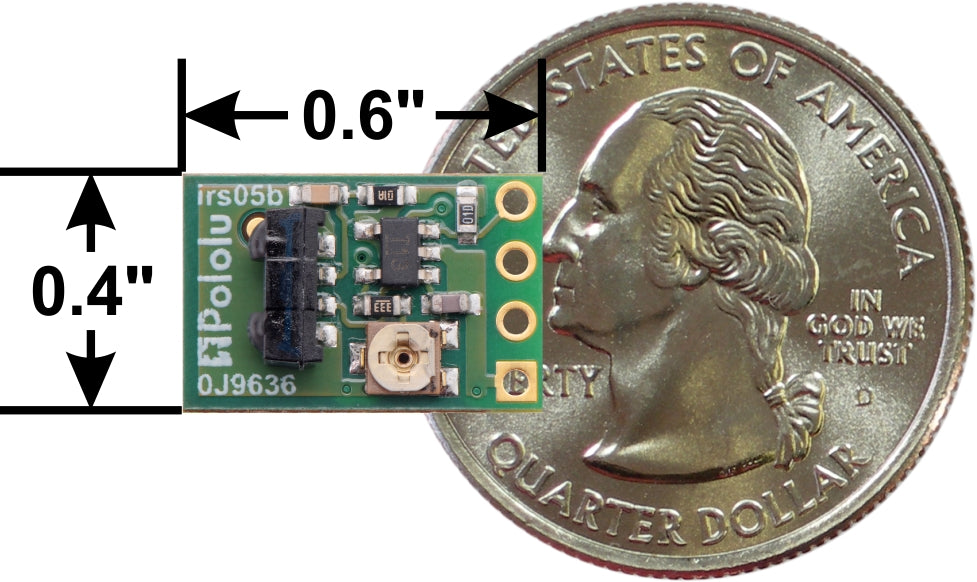
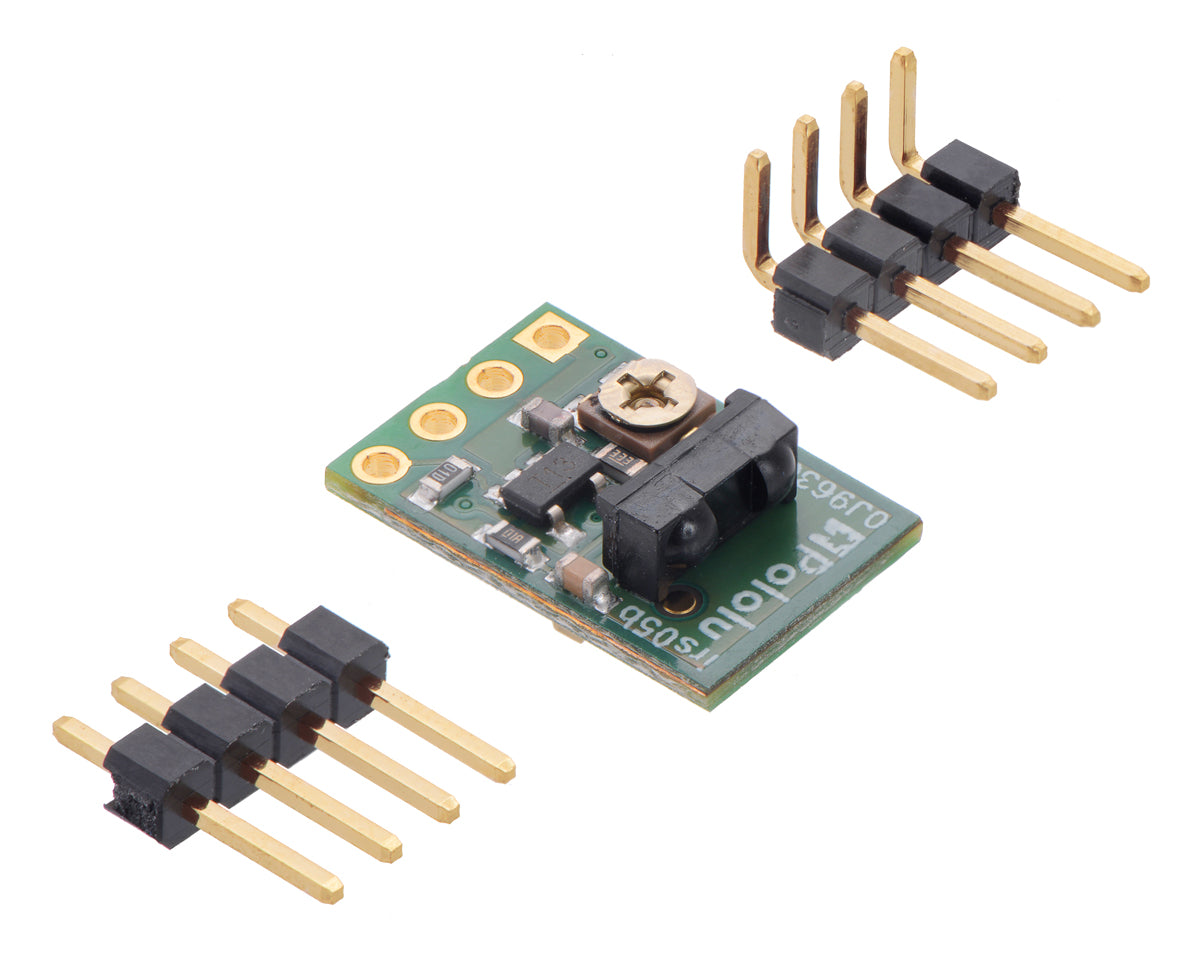
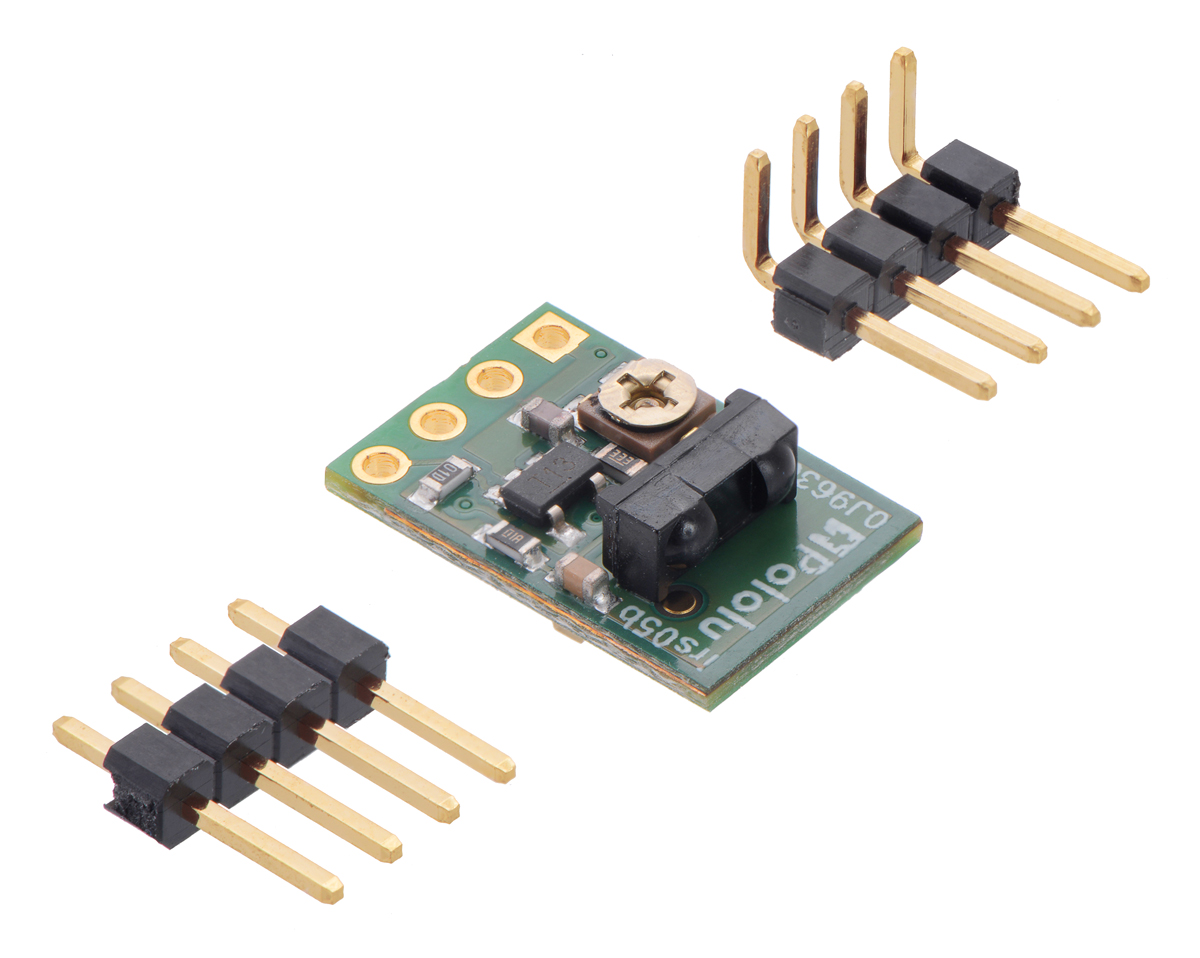
The four connections are arranged with a 0.1″ spacing along the edge of the board for compatibility with solderless breadboards, connectors, and other prototyping arrangements that use a 0.1″ grid. You can solder wires directly to the board or solder in either the 4×1 straight male header strip or the 4×1 right-angle male header strip that is included.
 |
Tuning the emitter frequency
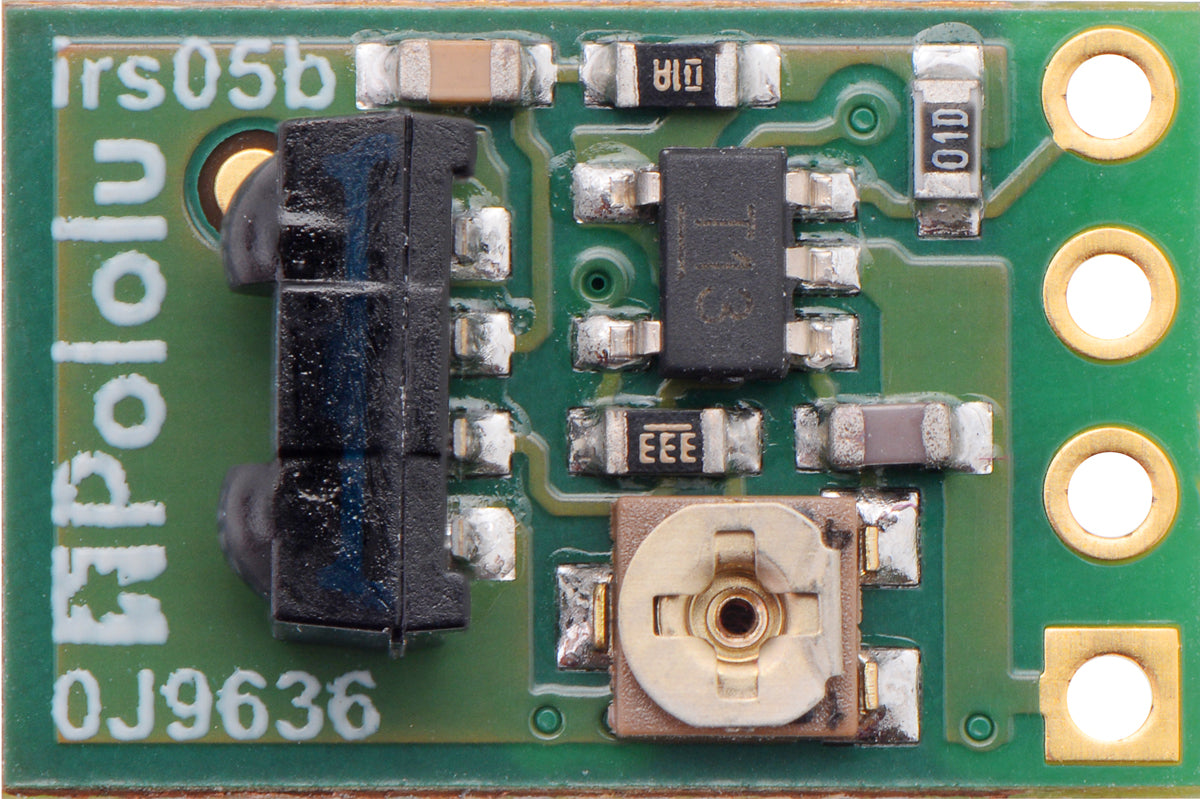
The trimmer potentiometer on the receiver side of the sensor can be used to adjust frequency of the IR emitter LED. The sensing distance can be maximized by tuning for 38 kHz, or it can be intentionally detuned to shorten the sensing range. If you have the appropriate equipment, you can tune it by setting the actual frequency, but a simpler approach is to just observe the performance as you turn the pot. The sensor should work to at least some degree over the entire range of the pot.
Limitations
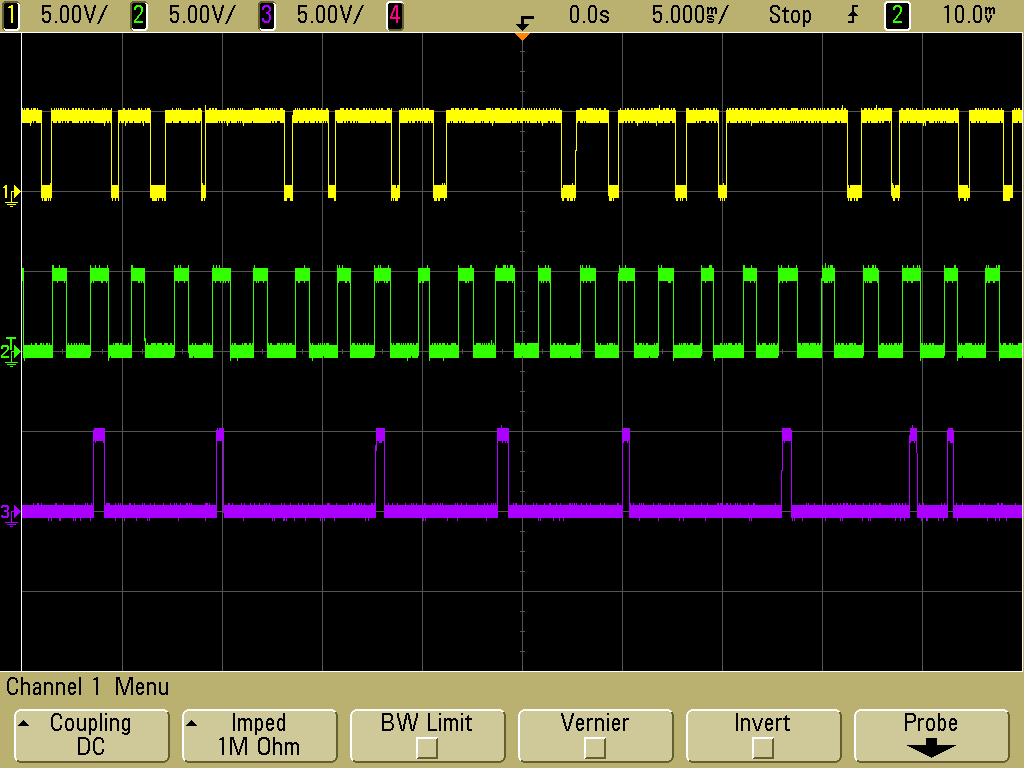
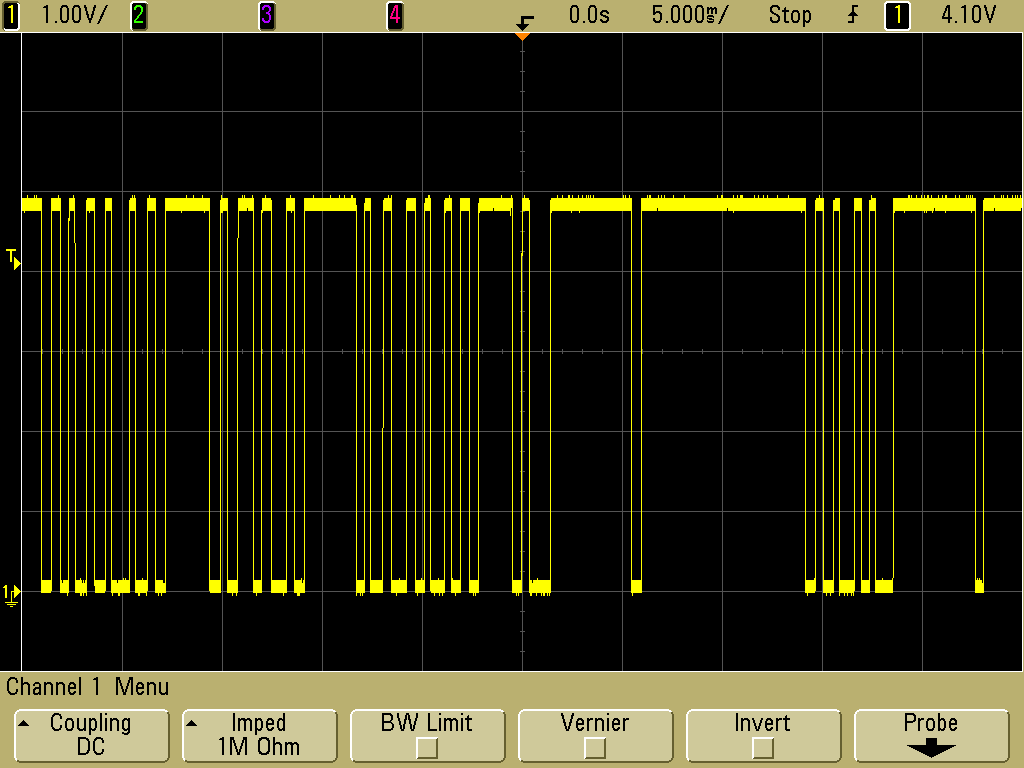
- This sensor will only tell you if an object is within its sensing range, not how far away it is. At the edge of its detection range, the output will alternate between high and low as it sporadically detects (see the left oscilloscope capture below).
- The sensor is merely looking at whether or not it is getting any signal back, so object size and reflectivity (to IR) will affect sensing range.
- The sensing angle is relatively wide in both directions. The high-brightness version in particular might require extra consideration when mounting to prevent seeing surfaces parallel to the sensor’s line of sight. For many applications, additional shielding can be used to block undesirable sensing paths, such as reflections off of the ground, or to reduce interference from ambient lighting. When applying shielding, keep in mind that reflection off the shielding itself can cause undesired activation of the sensor.
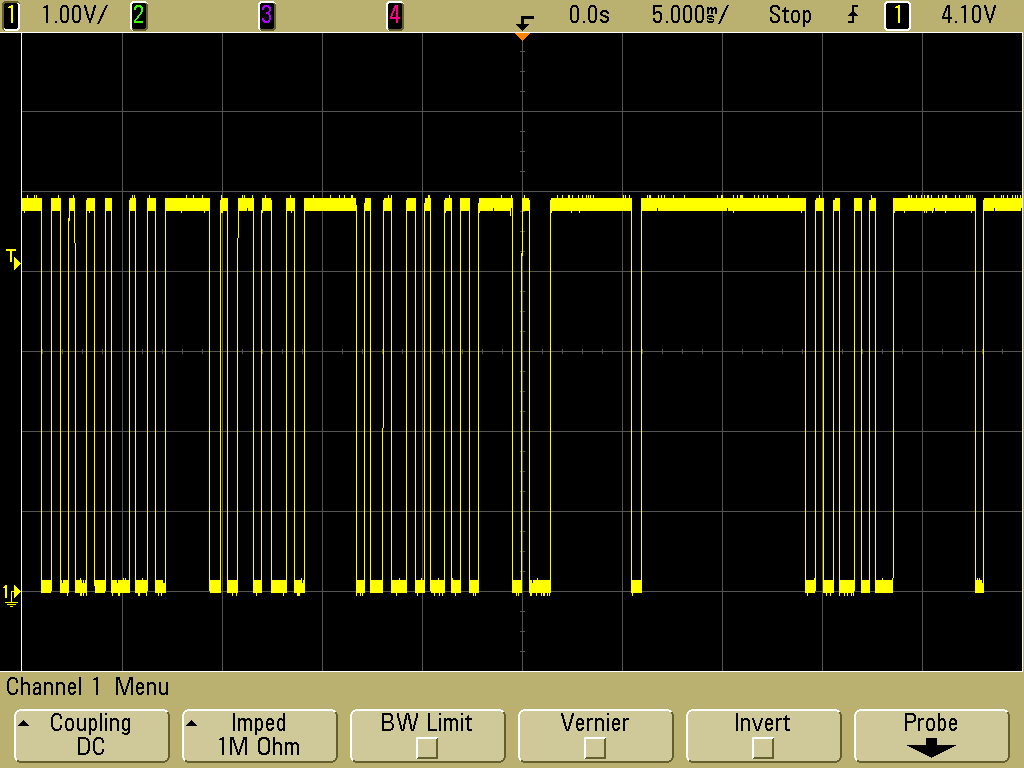
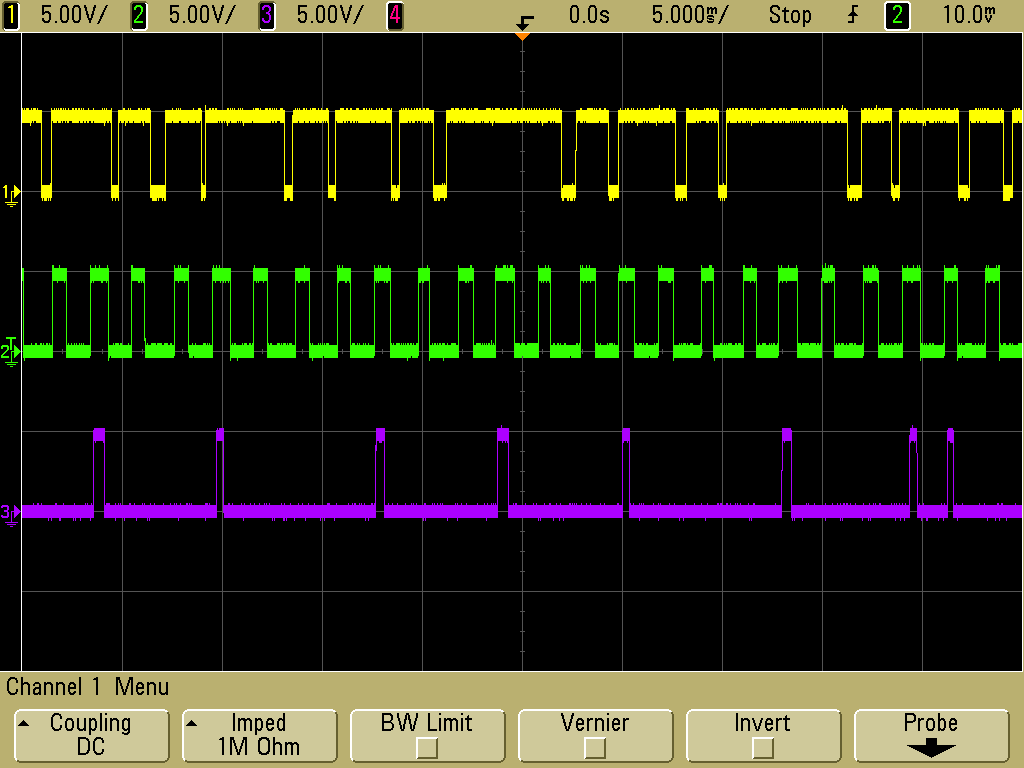
- This sensor can be triggered by ambient IR (e.g. from fluorescent lights; see the right oscilloscope capture below). Some optical shielding, such as by having the sensor mounted receiver-side-down when fluorescent lights are above, might mitigate this. Some advanced analysis of the correlation between the output and toggling of the enable input might also be used to mitigate ambient interference.
- Multiple sensors can interfere with each other. Multi-module applications might require use of the enable inputs to limit interference.
|
|
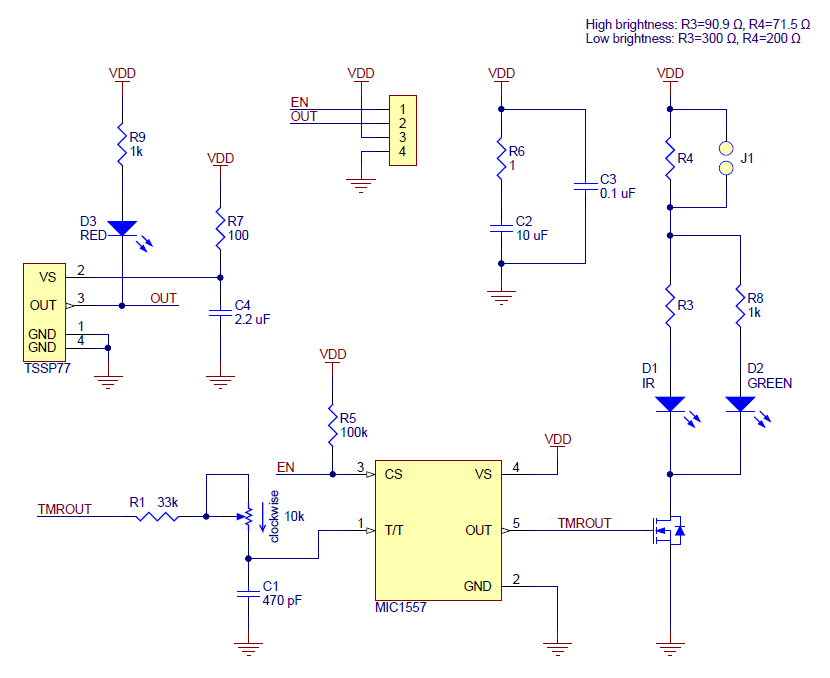
Schematic diagram
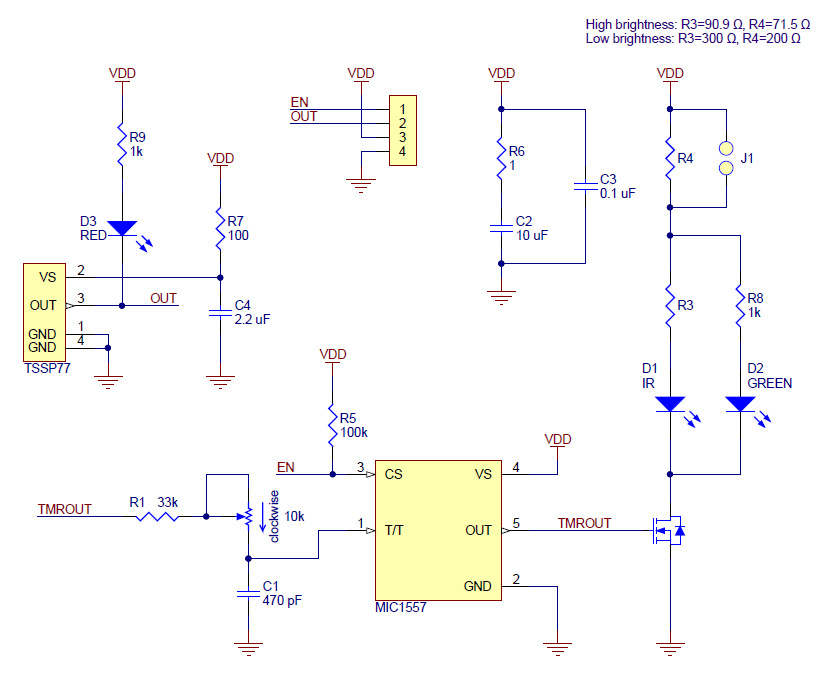 |
This schematic is also available as a downloadable pdf (96k pdf).
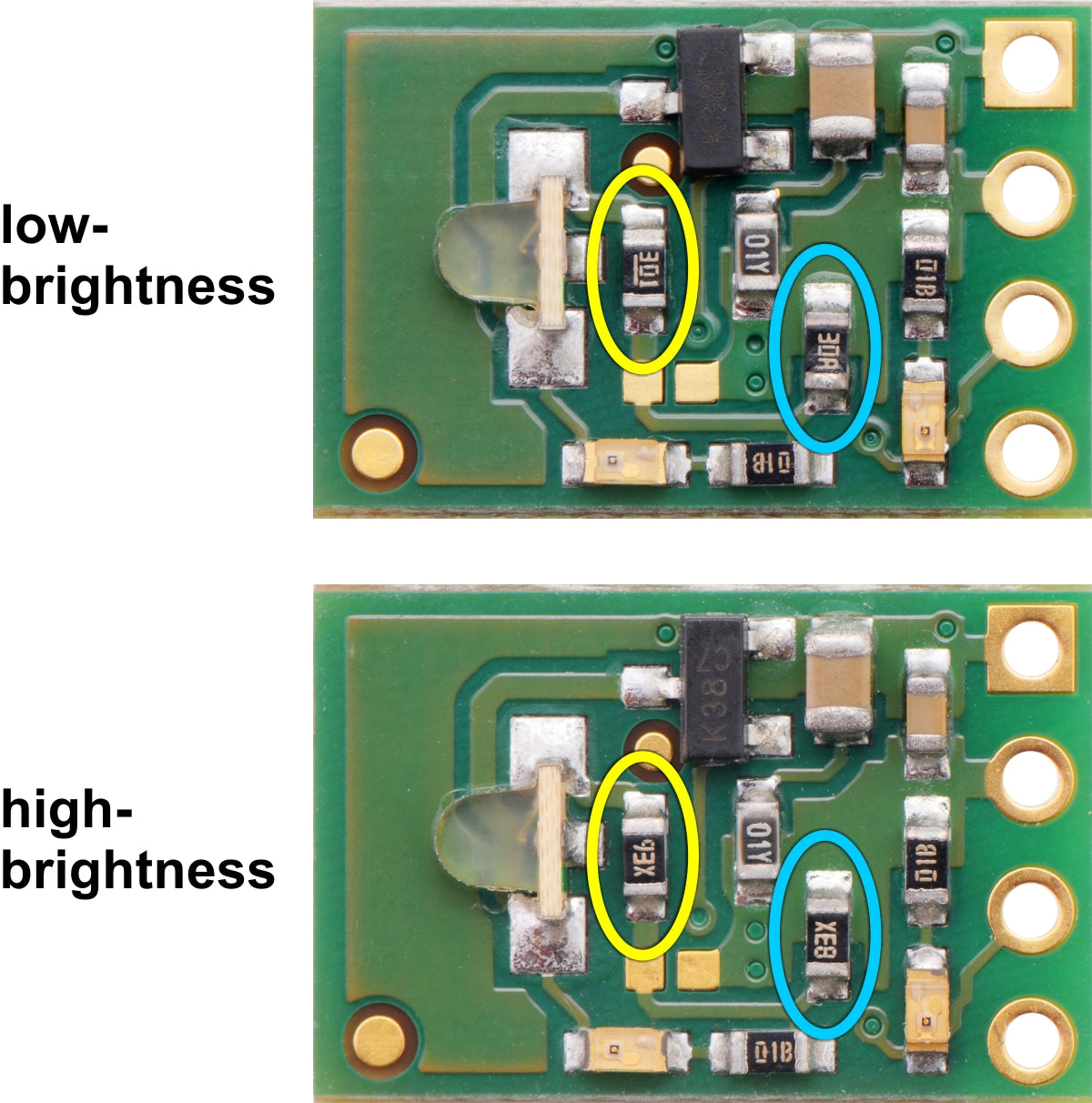
Differentiating the two versions
The low-brightness and high-brightness versions of this sensor look almost identical, but there are several ways to tell them apart. One is to look at resistors R3 and R4 on the emitter side of the sensor:
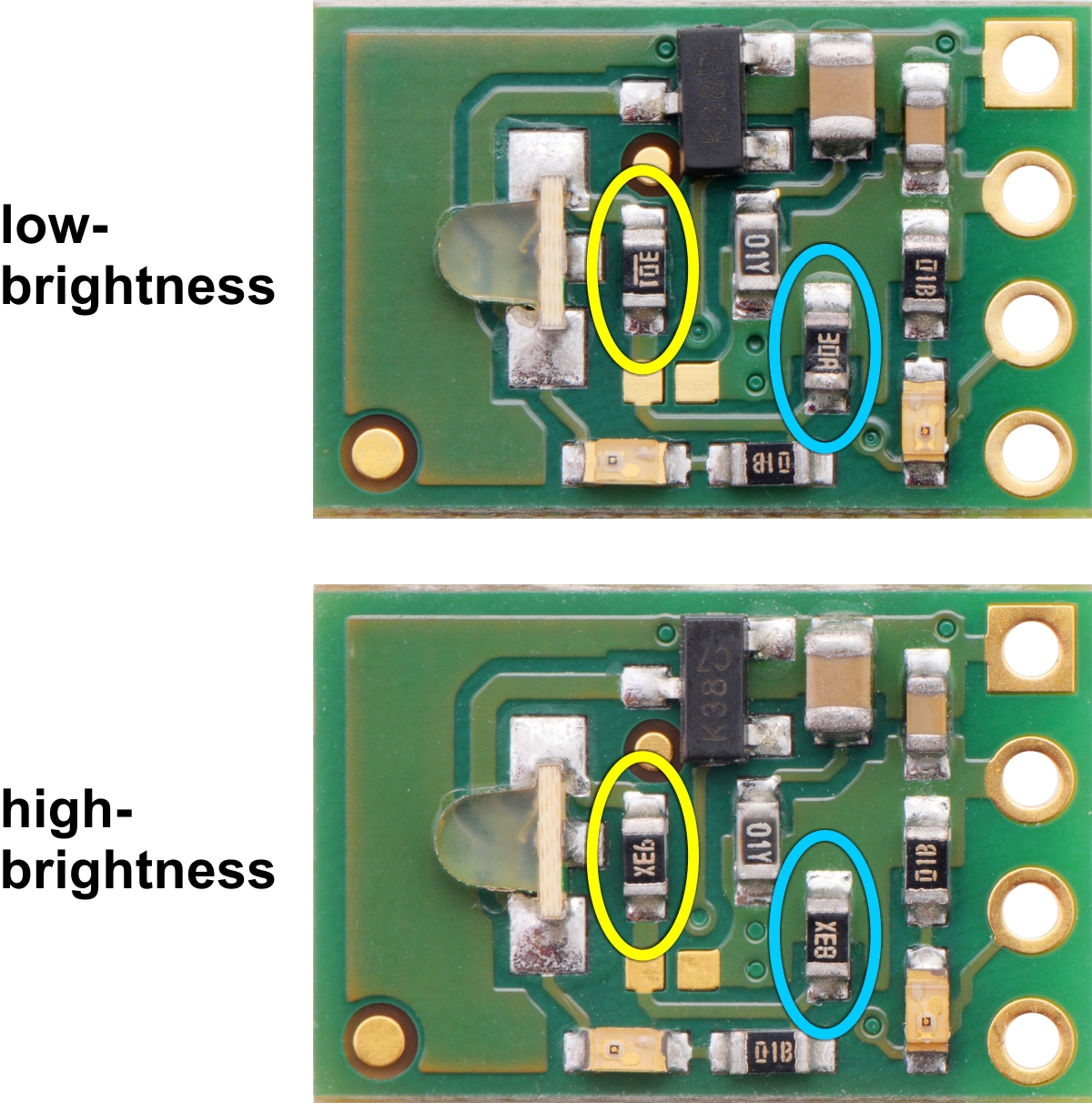 |
Another approach is to use a multimeter to measure the current draw of the sensor; the low-brightness version draws approximately 8 mA at 5 V while the high-brightness version draws approximately 16 mA at 5 V.