

The Pololu Zumo chassis is a small, tracked robot platform that is less than 10 cm on each side, allowing it to qualify for Mini Sumo competitions. The main body is composed of black ABS and features a compartment for four AA batteries and sockets for two micro metal gearmotors. It ships as a kit with two silicone tracks, two drive and two idler sprockets, a 1/16″ acrylic mounting plate, and mounting hardware. (Motors and batteries are not included.)
We also offer the entire zumo kit with a small discount compared to buying the parts seperately.
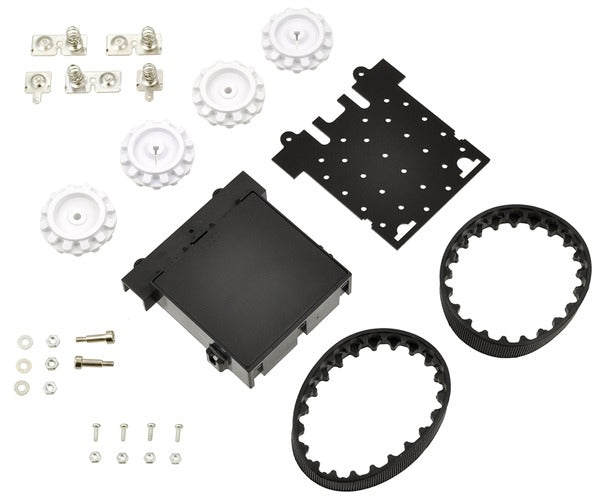
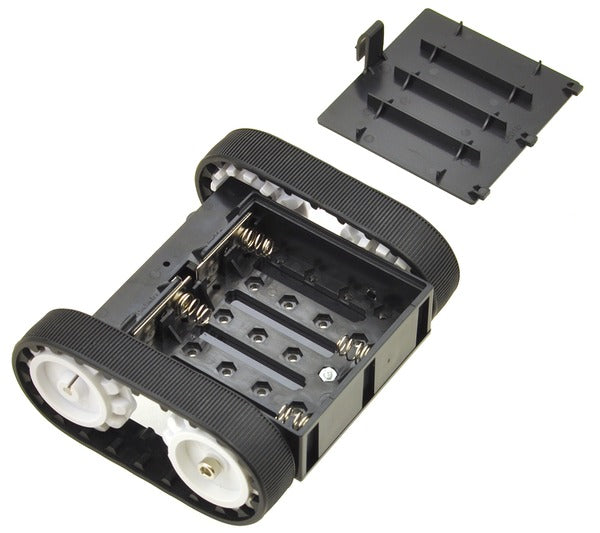
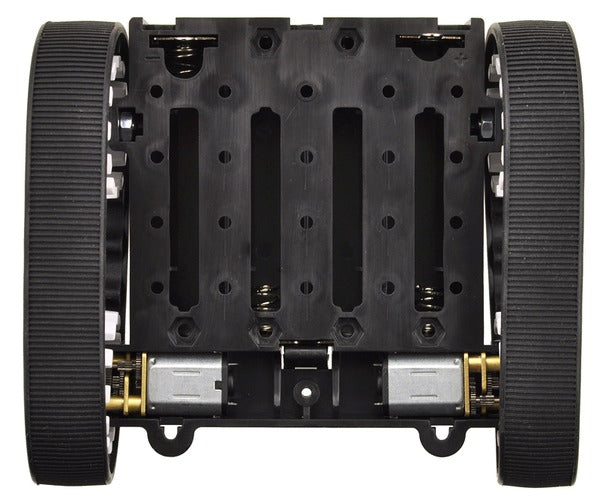
The Pololu Zumo chassis kit contains the components necessary to build a small, high-performance tracked robot platform that is compact enough to qualify for Mini Sumo competitions. Each side of the chassis has an idler sprocket that spins freely and a drive sprocket that connects to a micro metal gearmotor (not included). The main body is composed of ABS plastic and has sockets for two micro metal gearmotors and a compartment for four AA batteries (not included). The battery compartment terminals protrude through the chassis and can be accessed from the top side. A black acrylic plate is included with the chassis. This plate holds the motors in place and can be used for mounting your electronics, such as your microcontroller, motor drivers, and sensors.
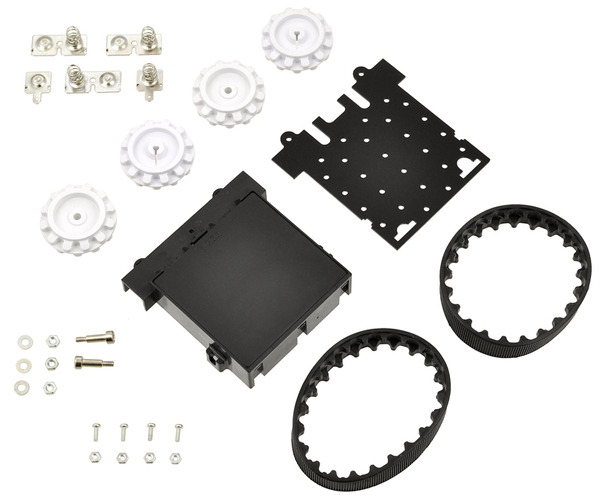 |
| Pololu Zumo chassis kit components. |
|---|
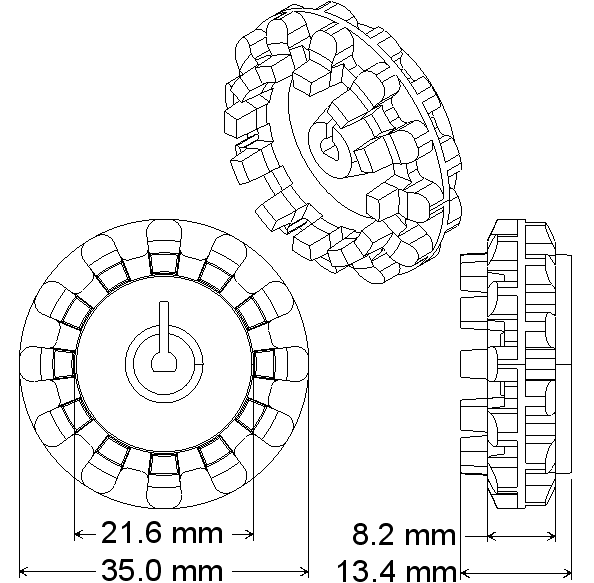
Motors (not included)
 |
| Micro metal gearmotor. |
|---|
 |
The Zumo chassis uses two motors, one for each tread. The ideal motors for your robot depend on your desired torque, speed, and current draw, so motors are not included with the chassis. If you have limited ability to supply current, we recommend using lower-power non-HP motors, which have a stall current of 360 mA at 6 V; if you have the ability to deliver more current, the HP micro metal gearmotors offer more torque and speed for the same gear ratio.
We recommend the 50:1, 75:1, or 100:1 HP motors for use with this chassis if you are using sufficiently powerful motor drivers, but the non-HP versions of those gear ratios should also work decently (just with lower torque and speed). The 30:1 micro metal gearmotors might also work, but note that non-HP 30:1 motors do not offer much torque, so they are not very practical for sumobots and the robot might have difficulty turning on high-friction surfaces like carpet, and 30:1 HP motors will make the more difficult to control due to its higher top speed. The following table shows theoretical limits based on the motor specifications alone (the weight of the chassis and the load imposed by the tracks will decrease the motor speed). Note that the specifications are for 6V operation, while four NiMH AA cells will typically provide less than 5V.
| Micro Metal Gearmotor |
Speed @ 6V |
Top Zumo Speed @ 6V |
Stall Torque @ 6V |
Stall Current @ 6V |
|
|---|---|---|---|---|---|
| 100:1 HP | 320 RPM | 25 in/s | (65 cm/s) | 30 oz·in | 1600 mA |
| 75:1 HP | 400 RPM | 32 in/s | (80 cm/s) | 22 oz·in | 1600 mA |
| 50:1 HP | 625 RPM | 50 in/s | (130 cm/s) | 15 oz·in | 1600 mA |
| 30:1 HP | 1000 RPM | 80 in/s | (200 cm/s) | 9 oz·in | 1600 mA |
| 100:1 | 120 RPM | 10 in/s | (25 cm/s) | 12 oz·in | 360 mA |
| 75:1 | 170 RPM | 14 in/s | (35 cm/s) | 9 oz·in | 360 mA |
| 50:1 | 250 RPM | 20 in/s | (50 cm/s) | 7 oz·in | 360 mA |
| 30:1 | 440 RPM | 35 in/s | (90 cm/s) | 4 oz·in | 360 mA |
Electronics (not included)
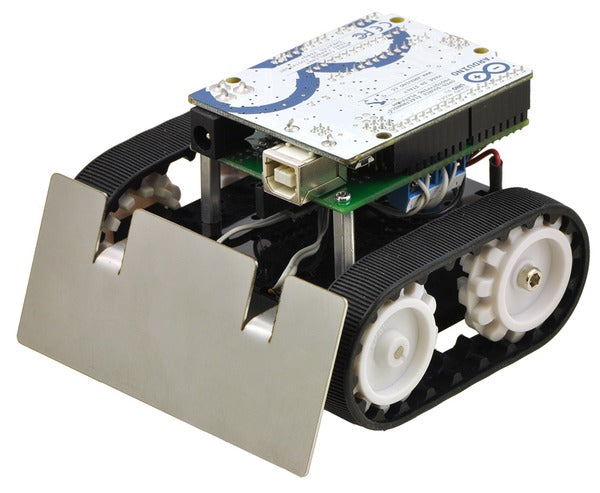
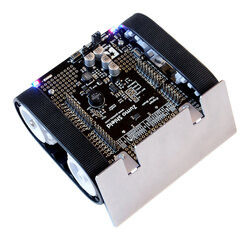
The Zumo Shield for Arduino is designed specifically to act as an interface between an Arduino Uno or Leonardo and the Zumo chassis. The shield provides all the electronics necessary to power the motors and includes some additional fun components for making a more interesting robot, such as a buzzer for making sounds and a 3-axis accelerometer and compass. The Zumo chassis is also available bundled with a Zumo Shield and Zumo blade.
|
|
If your goal is to make a robot based around a controller other than an Arduino, we recommend the DRV8833 motor driver carrier or qik 2s9v1 for use with this chassis.
 |
Batteries (not included)
This chassis works with four AA batteries. We recommend using rechargeable AA NiMH cells, which results in a nominal voltage of 4.8 V (1.2 V per cell). When the batteries are fully charged, they will be well above 5 V, and when they are almost spent, they will be well below 5 V. As such, you might consider using a step-up/step-down voltage regulator to power your logic, since this will hold your logic voltage steady at 5 V, no matter if your battery voltage is above or below 5 V. You can also use alkaline cells, which would nominally give you 6V, but that voltage would drop depending on the load.
Basic sumo blade (not included)
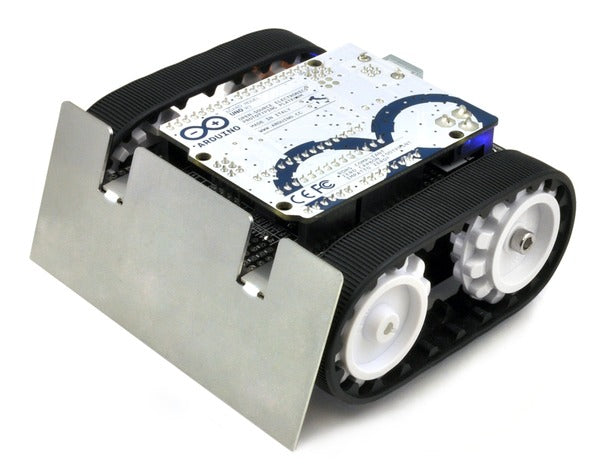
We carry a basic stainless steel sumo blade that can be mounted to front of the Zumo chassis. With this blade, the Zumo chassis can push around objects, such as other MiniSumo robots. You can also use the design file for this basic blade as the starting point for a custom sumo blade.
 |
| Basic sumo blade mounted on a Zumo chassis. |
|---|
Dimensions
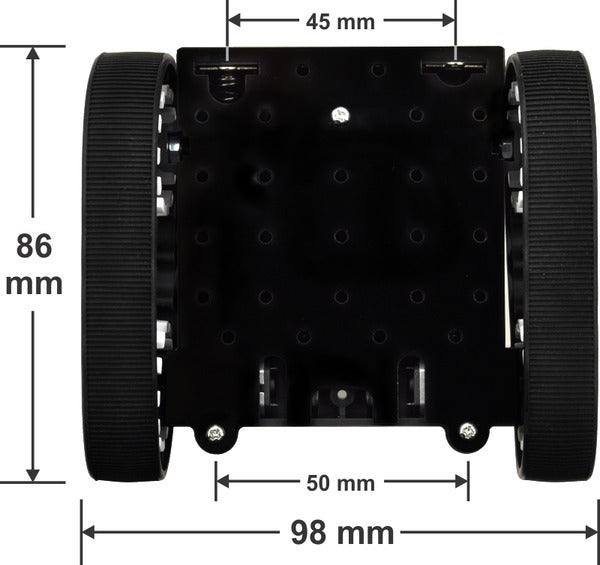
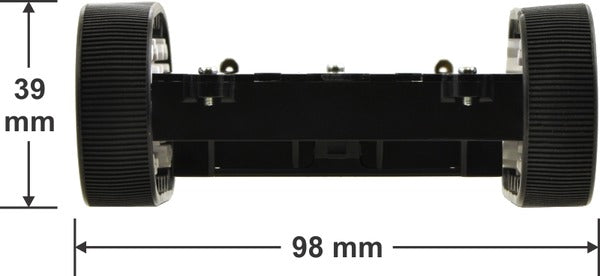
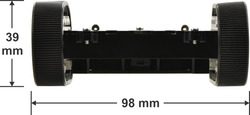
Fully assembled, the Zumo chassis is 98 mm wide, 86 mm long, and 39 mm high, with approximately 5 mm of ground clearance.
|
|||
 |
|||
| Pololu Zumo chassis, assembled front view with dimensions. |
|---|
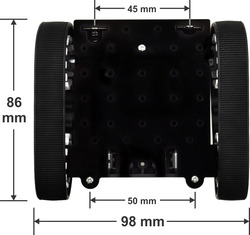
Since each side is smaller than 10 cm, this chassis meets Mini-Sumo size requirements. The front screws used to mount the acrylic plate to the chassis can also be used to mount a front scoop that can extend up to 14 mm before exceeding the Mini Sumo limits. The assembled Zumo chassis weighs approximately 210 g with motors and batteries.
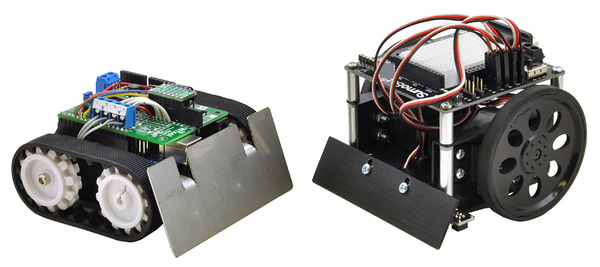 |
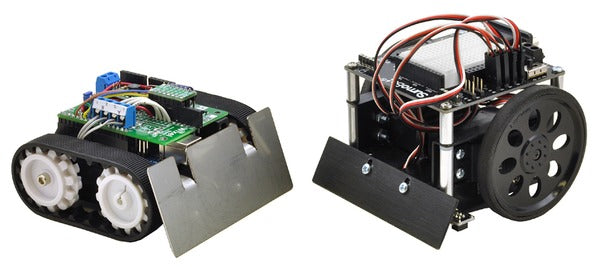
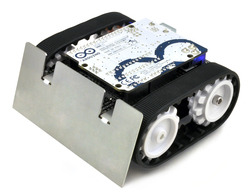
| Example robot based on the Pololu Zumo chassis next to a Parallax SumoBot. |
|---|